
„DigiPrüF“ – Die digitale Prüfplattform für die Fahrzeug- und Zuliefererindustrie
Heute stellen wir Ihnen DigiPrüF – die Digitale Prüfplattform für die Fahrzeug- und Zulieferindustrie vor. Ziel des …
Heute stellen wir Ihnen DigiPrüF – die Digitale Prüfplattform für die Fahrzeug- und Zulieferindustrie vor. Ziel des …

Wenn ein KI-System implementiert und live in Verwendung ist, erstellt es Vorhersagen…

Im Zuge des Forschungsprojektes MeMoRob verwenden wir…

Die Konferenz zählt im Bereich der numerischen Mathematik zu den größten…
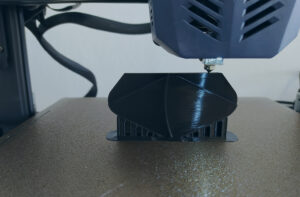
Da viele unserer Projekte – anders als der Firmenname ATR Software GmbH vermuten lässt – über reine Softwareprojekte hinausgehen, ist es nur naheliegend für das schnelle

Bei der Industrie 4.0 dreht sich alles um die Vernetzung von Menschen, Maschinen und Produkten. Dreh- und Angelpunkt bei der Modernisierung für das Internet of Things

Das Software-Modul „Data Analytics” der ATR-Softwareplattform umfasst eine Vielzahl von Methoden und Lösungen zur Verarbeitung und Aufbereitung von Daten, die aus verschiedensten Bereichen erhoben werden. Zuletzt
Gemeinsam mit mehreren Forschungseinrichtungen und Industriepartnern ist ATR Software an dem Forschungsprojekt ProsKI – Resiliente Produktionsplanung und -steuerung durch den Einsatz von künstlicher Intelligenz (KI) beteiligt. Initiiert wird
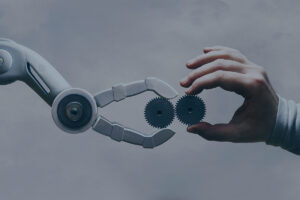
Gemeinsam mit der FuE-Einrichtung Fraunhofer IGCV und mehreren Industriepartnern ist ATR Software an dem Forschungsprojekt MeMoRob – Mensch und mobiler Roboter in einer Arbeitsumgebung beteiligt. Das
Sie sehen gerade einen Platzhalterinhalt von Vimeo. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie müssen den Inhalt von hCaptcha laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie müssen den Inhalt von Turnstile laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr Informationen